Categoría: Tutoriales
XAMARIN.FORMS – Obtener información del Dispositivo
Distribuye apps fácilmente para pruebas in-house con DIAWI
Enjoy…….
Pruebas Unitarias – Parte 2
Continuación de la primera parte donde se implementan las rutinas Assert y todo sobre la cobertura de código, espero les sea de ayuda y provecho para sus tareas de programación diarias.
Enjoy 😉
Pruebas Unitarias – Parte 1
Hola, sean bienvenidos a una nueva sección, donde vamos a explicar un poco todo lo relacionado con este tema muy interesante de unit testing, a continuación en la primera entrega de videos de programación y buenas practicas.
Espero les sea de provecho y utilidad, esperen la segunda parte que ya esta en el horno, salu2…
Tutorial KINECT camaras RGB y de profundidad (DEPTH)

Hola
Empezaremos por lo básico, en Visual Studio 2010 creamos un nuevo proyecto WPF y en mi caso le llamare KinectPruebaCamaras.
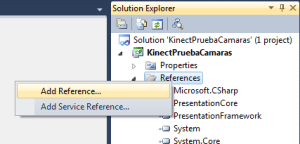
 Ahora bien una vez creado el proyecto con sus archivos iniciales nos vamos a agregar la referencia para trabajar con nuestra KINECT
Ahora bien una vez creado el proyecto con sus archivos iniciales nos vamos a agregar la referencia para trabajar con nuestra KINECT

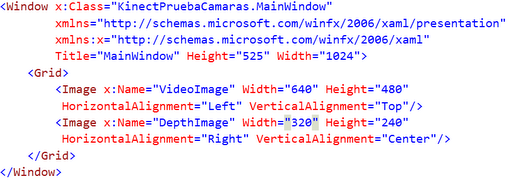
Ok hasta este punto ahora vamos a nuestro código XAML de nuestra aplicación e insertamos dos controles de imagen dentro del Grid inicial donde la primera le llamaremos VideoImage y a la otra DepthImage
Bien ahora vamos a lo que en realidad tenemos que hacer, nos vamos al code behind de nuestro archivo MainPage.xaml y empezamos por lo siguiente agregando la Referencia con el siguiente código.
using Microsoft.Kinect;
ahora declaramos una variable de tipo KinectSensor que yo llamare sensor y dos variables una de tipo byte que llamare pixeldata y otra de tipo short que llamare pixel.
KinectSensor sensor = KinectSensor.KinectSensors[0];
byte[] pixelData;
short[] pixel;
Ahora debemos de habilitar las camaras con estas dos rutinas, uno para la cámara de RGB y la otra para la cámara de profundidad (DEPTH), debemos de indicar al Kinect que vamos a utilizar en este caso las dos camaras antes mencionadas.
public partial class MainWindow : Window
{
KinectSensor sensor = KinectSensor.KinectSensors[0];
byte[] pixelData;
short[] pixel;
public MainWindow()
{
InitializeComponent();
sensor.ColorStream.Enable();
sensor.DepthStream.Enable();
}
}
“Vamos bien ahí”… bueno ahora necesitamos indicar tanto iniciar el KINECT al correr la aplicación y cuando cerremos la aplicación con estas dos sencillas rutinas Start() y Stop()… (“sencillo no!?”) y en la sección del método Window_Loaded vamos a crear dos eventos ruteados dentro de la variable sensor que yo llame que contiene toda la información del dispositivo que son ColorFrameReady y DepthFrameReady.
private void Window_Loaded(object sender, RoutedEventArgs e)
{
sensor.ColorFrameReady += new EventHandler<ColorImageFrameReadyEventArgs>(sensor_ColorFrameReady);
sensor.DepthFrameReady += new EventHandler<DepthImageFrameReadyEventArgs>(sensor_DepthFrameReady);
sensor.Start();
}
private void Window_Closing(object sender, System.ComponentModel.CancelEventArgs e)
{
sensor.Stop();
}
Bien ya creamos los objetos, tenemos las librerías de Kinect, inicializamos y cerramos nuestro dispositivo ahora bien falta capturar lo que nos llega de las dos camaras y guardarlas en una variable y mostrarlas en nuestra aplicación para poder empezar a trabajar en nuestro KINECT ahora vamos al método sensor_ColorFrameReady y colocamos el siguiente código.
void sensor_ColorFrameReady(object sender, ColorImageFrameReadyEventArgs e)
{
bool receivedData = false;
using (ColorImageFrame CFrame = e.OpenColorImageFrame())
{
if (CFrame == null)
{
}
else
{
pixelData = new byte[CFrame.PixelDataLength];
CFrame.CopyPixelDataTo(pixelData);
receivedData = true;
}
}
if (receivedData)
{
BitmapSource source = BitmapSource.Create(640, 480, 96, 96,
PixelFormats.Bgr32, null, pixelData, 640 * 4);
VideoImage.Source = source;
}
}
En el código que acabo de colocar creamos una variable de tipo boleana para detectar mediante una condición para capturar lo que nos arroja la cámara copiando los datos de lo que nos contiene CFrame y después volvemos a preguntar por nuestra variable boleana y de ser verdadero procede a crear un BitmapSource en el cual abrimos dándole los parámetros que demuestro en el código, detenerme a explicar los parámetros no son necesarios por ahora para este tutorial rapido pero en mi primer tutorial son los mismos parámetros que describi y explique, la novedad en esa función es que se pueden jugar ahora con valores superiores o inferiores en escalas proporcionales a la que colocamos por default que es 640 x 480.
Entonces bien ahora vamos a la siguiente cámara que es la de profundidad dando este codigo
void sensor_DepthFrameReady(object sender, DepthImageFrameReadyEventArgs e)
{
bool receivedData = false;
using (DepthImageFrame CFrame = e.OpenDepthImageFrame())
{
if (CFrame == null)
{
}
else
{
pixel = new short[CFrame.PixelDataLength];
CFrame.CopyPixelDataTo(pixel);
receivedData = true;
}
}
if (receivedData)
{
BitmapSource source = BitmapSource.Create(320, 240, 96, 96,
PixelFormats.Gray16, null, pixel, 320 * 4);
DepthImage.Source = source;
}
}
Es el mismo tratamiento que explique en el método anterior pero lo que cambia es el formato de Pixeles y le colocamos Gray16 (PixelFormats.Gray16) y cambiamos la resolución a 320 x 240 claro también podemos colocarle la resolución de la otra cámara 640 x 480
Ahora corremos nuestra aplicación y tenemos las 2 camaras, tanto la de profundidad como la RGB funcionando y habilitadas para trabajar con nuestra KINECT, es importante destacar que estos son los métodos básicos para tener en funcionamiento estas 2 camaras, ya el resto queda de parte de nuestra creatividad
Estoy trabajando actualmente en el siguiente Tutorial para reconocimiento del personaje y de las librerías Skeleton para hacer infinidades de cosas con nuestro KINECT.
Salu2
